







Concept Generation
The two prevailing design philosophies that groups at RMIT considered was firstly having a split system. One part would move on the ground to pick up the package. This would be connected with a tether to another system on the wire that would carry that vehicle across the chasm so it can deposit the package and bring it back home. Split system robots seemed like a promising solution to the problem especially considering that the competition surface was 1.2 meters x 2.4m. The size of the competition platform would make a single system very large and difficult to manage. The only way to reduce the size of the robot would be to allow it to separate from the wire drive to pick up the package and then reattach to the wire. However, a detachable system would not only be very slow but also a nightmare in terms of reliability as the robot would need to have an accurate understanding of where it is.
While the split system robots seemed like a promising solution to the problem, we couldn’t see a way to get it to complete a run in 4 seconds which was the ballpark that we were told a winning robot would have to be in. For that reason, we took a different approach. To simplify the run as much as possible we needed a single system that did not detach from the wire. Despite concerns about the size of a single system that does not detach from the wire we believed that it would be the fastest approach to the problem. Due mostly to the simplicity of the run sequence. Staying attached to the wire allowed us to break the run down into 4 distinct segments.
- picking up the package.
- moving across the wire.
- depositing the package.
- returning to start.
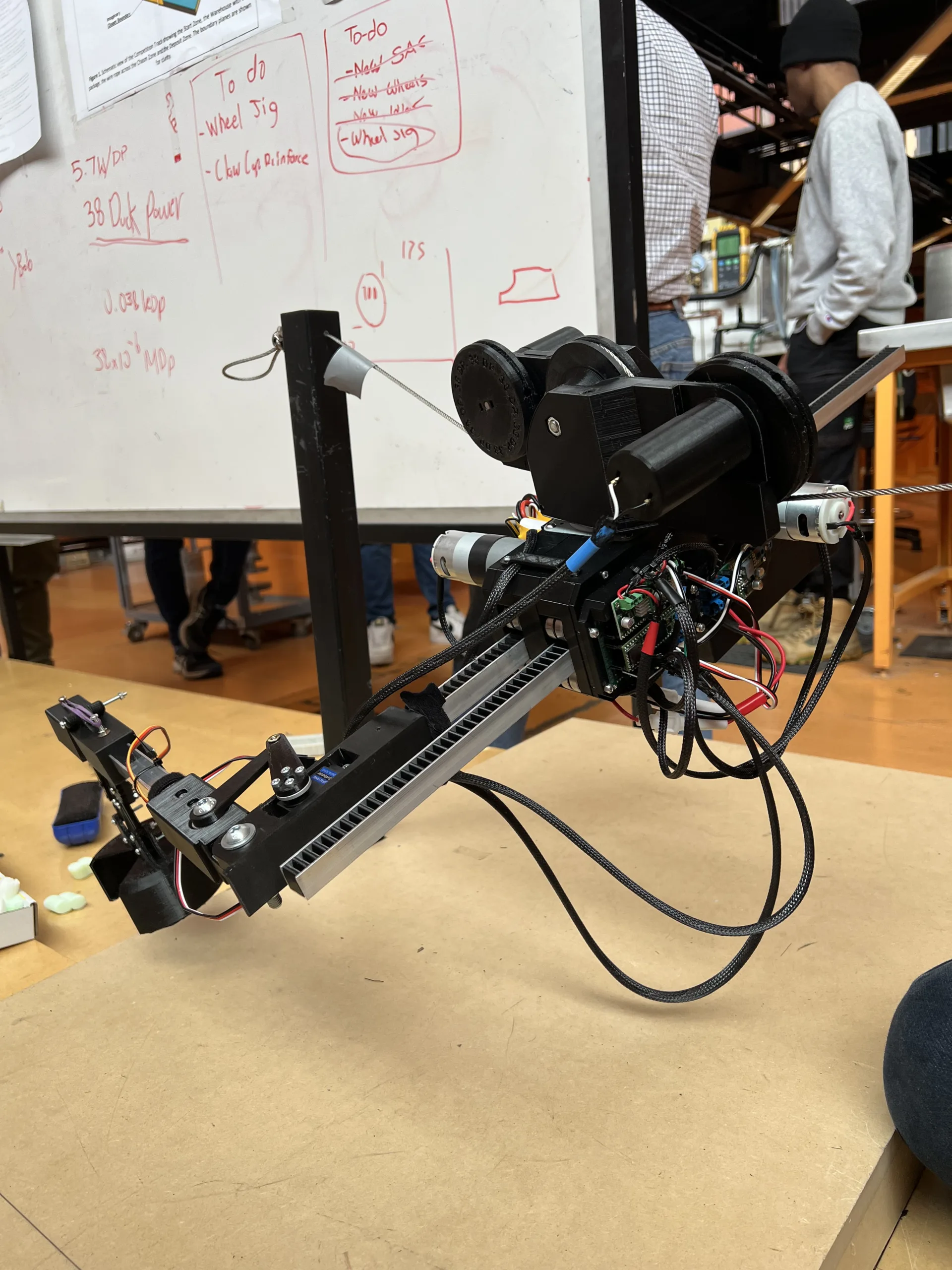
Essentially, we could have to build a crane with an extendable arm that could pick up the package move itself across the wire, rotate towards D and drop off the package before returning to the start zone.
A Few Bad Ideas and One Very Good One
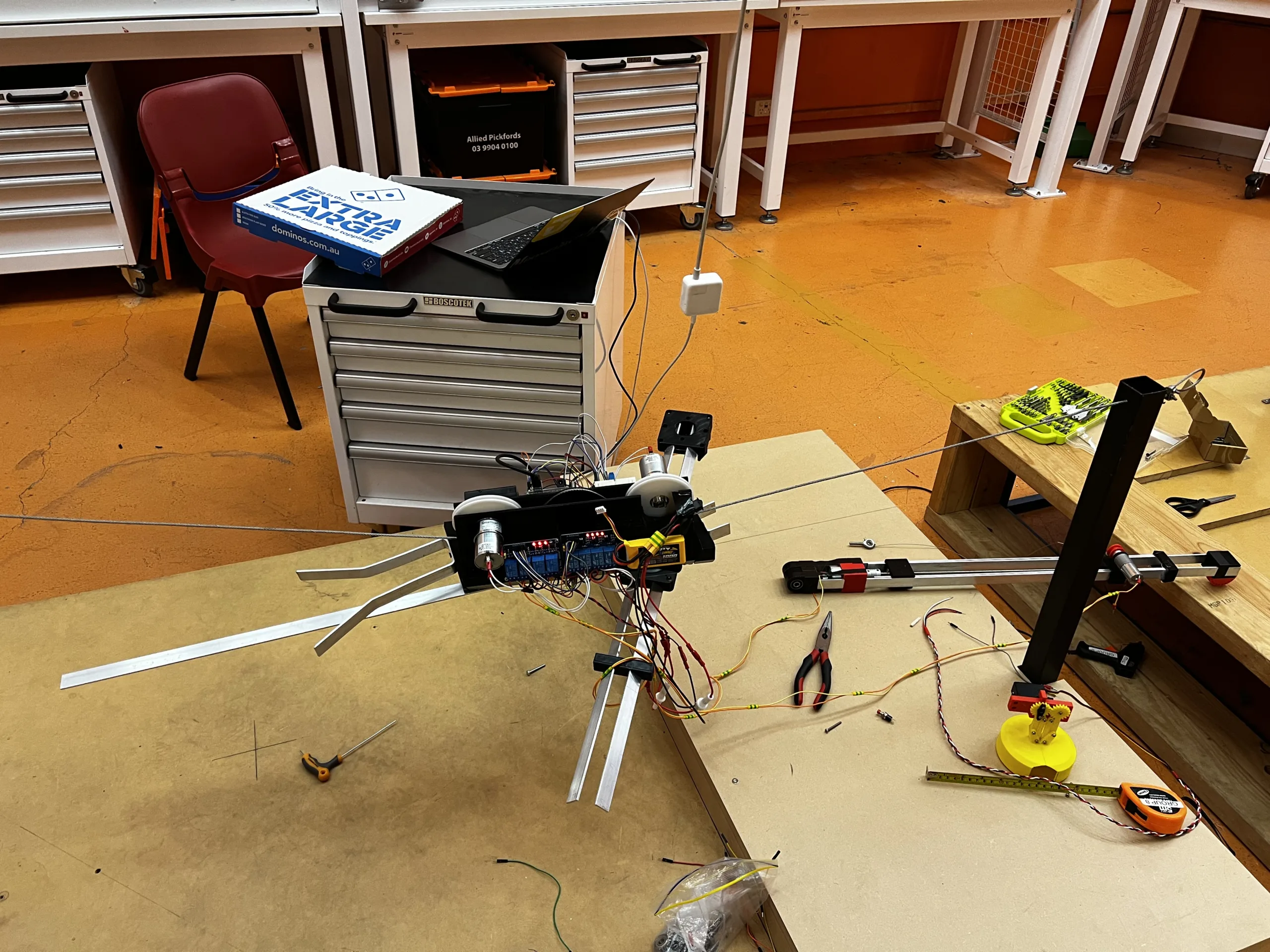
The first issues we would face would be to firstly design a system that can fit into the 900x600mm start zone and also be able to extend an arm to about 1200mm to reach D. Secondly this arm would have to be able to pick up the package on one corner of the track and drop it off on the opposite one. meaning it would have to be able to precisely extend and rotate. As the robot crossed to the other side it would also have to stay clear of the chasm which would only be 25cm below the wire at the lowest point.

The Arm
Our first solution to making an extendable arm would be to design a long scissor arm mechanism controlled by two servo motors. In theory with the two servo motors we would be able to adjust not just extension and retraction of the arm, but also the vertical angle relative to the robot. To us this seemed like an ideal solution however in practice it proved to be anything but that. After hours of 3d printing and tedious assembly of the arm we found that excessive flex in the scissor mechanism meant that the arm couldn’t hold its own wight or transfer any kind of pushing force through itself. This was the first of many bad ideas.

The Drivetrain
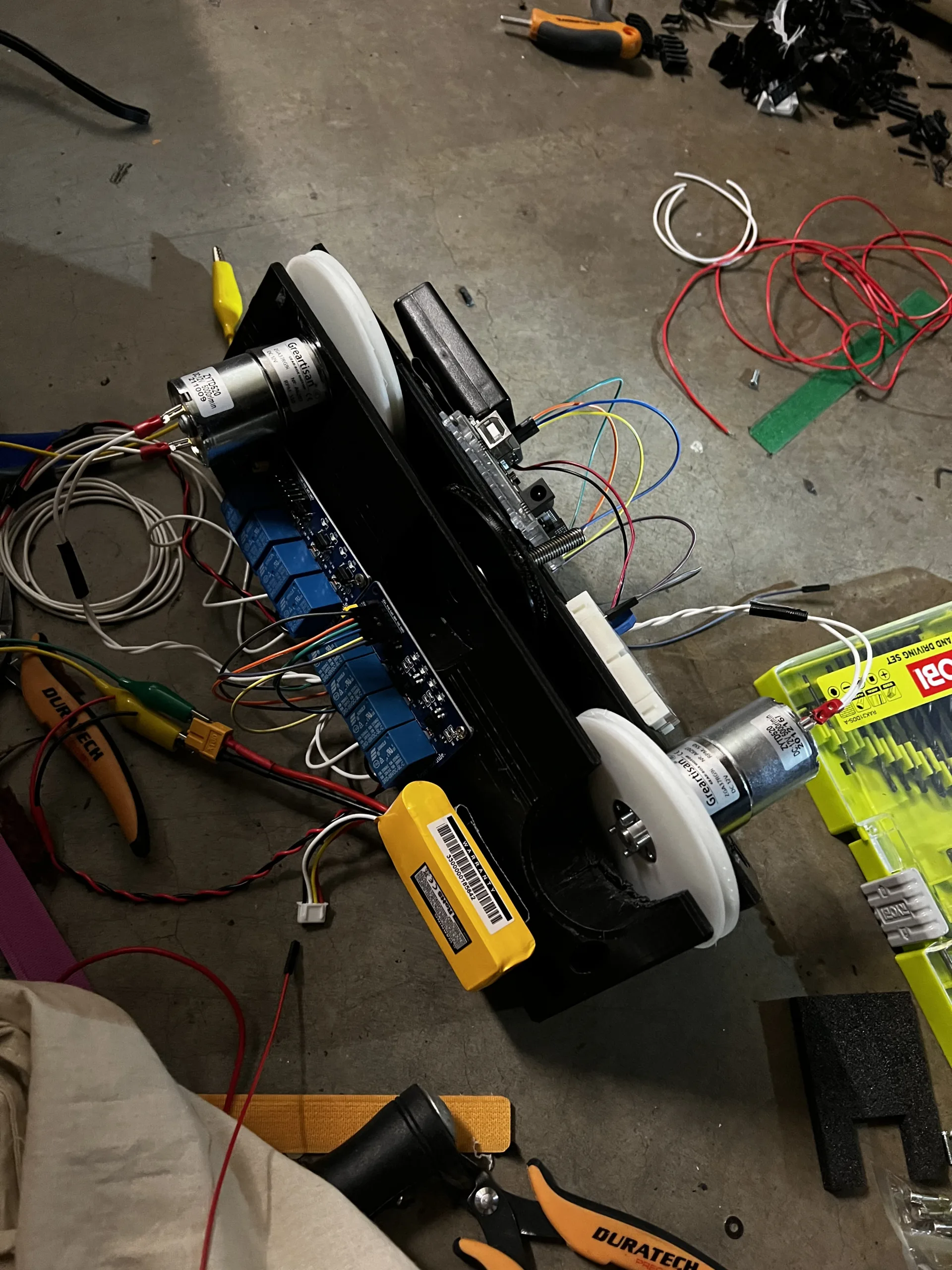
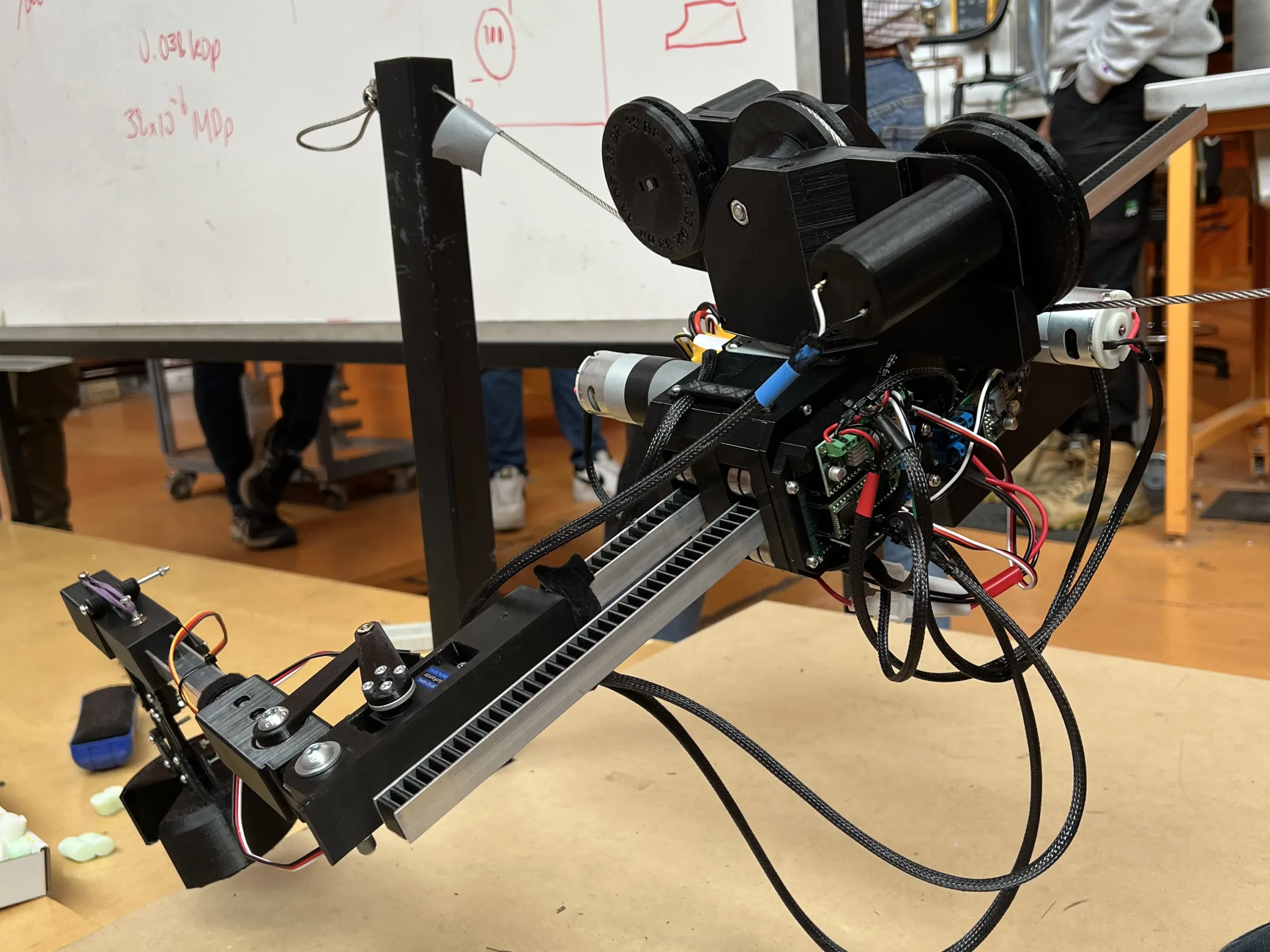
To fix the issue of the low clearance in the middle of the track we decided to make use of an idler pully. In addition to two powered pully wheels that would sit on the wire the idler pully in the middle of these two would take out any slack in the wire increasing the clearance available when crossing the wire. This in principle was a great idea however our execution of it was incredibly poor. To get the robot on and off the wire we needed to take out 5 screws, use a screwdriver to squeeze the wire around the 3 pulleys introducing excessive resistance into the drive train (this will hurt later).

The Claw
Finally, to pick up the wheel we decided on a claw mechanism. We felt this was the easiest and most reliable way to pick up and deposit the package. Our claw would use two semicircular cups to grab the package placed horizontally on the ground. This system used a 4-bar mechanism to make sure that either cup was parallel with each other throughout the travel of the mechanism. This worked brilliantly this was the only part of our robot that we never had any issues with something we were particularly grateful as we saw how much trouble other teams had with their claw systems.
These three systems would make up the fundamental concept of our robot at least at the start. In the next update I’ll detail how the implementation of these systems turned our hair grey and how we redesigned everything.





